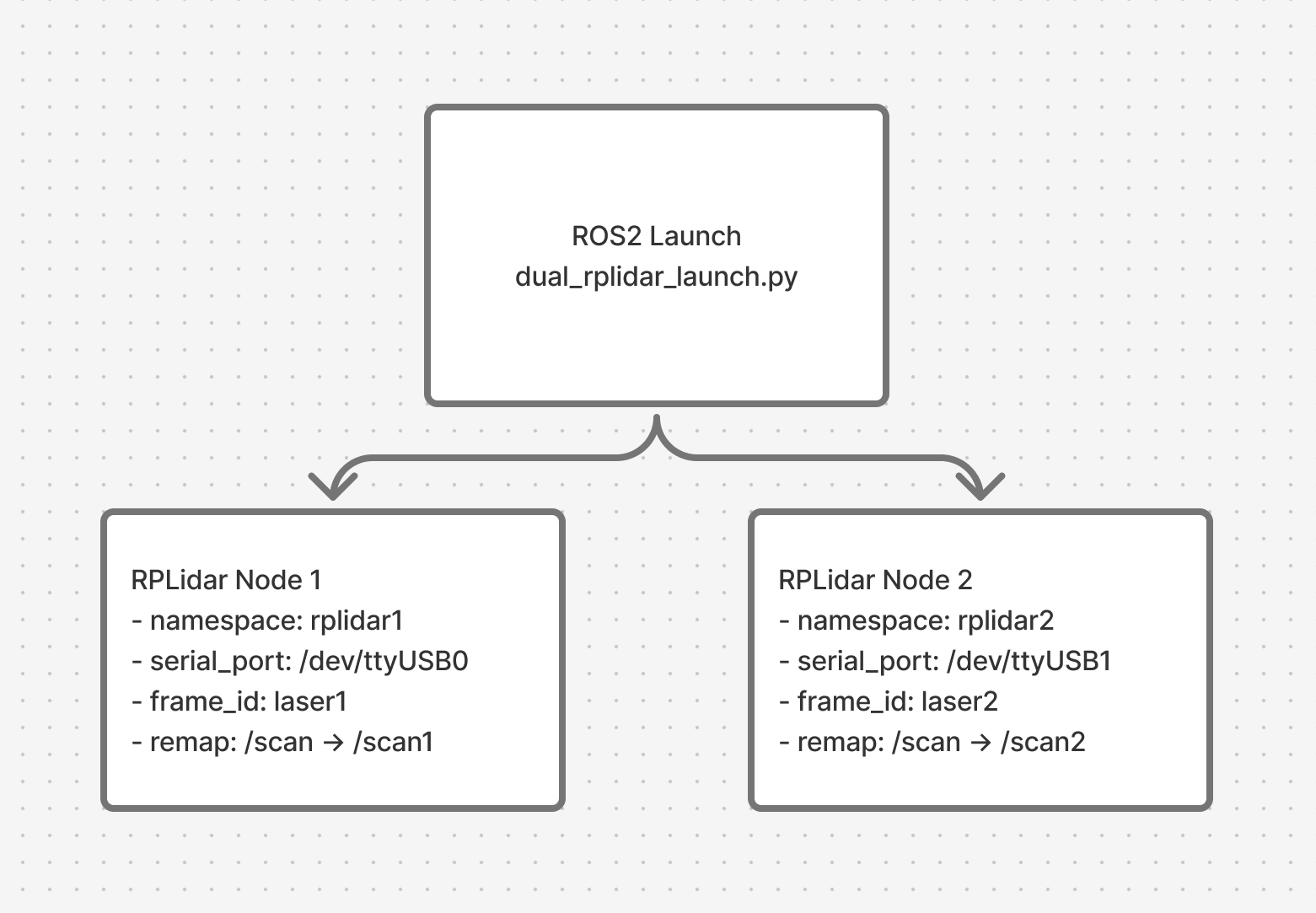
RPLidar 2개를 Launch 파일로 묶은 패키지입니다.
패키지 Github Repository
2개의 라이다를 사용할 때 각각의 데이터를 융합하여 정확도가 높은 1개의 토픽으로 발행하는 패키지입니다.
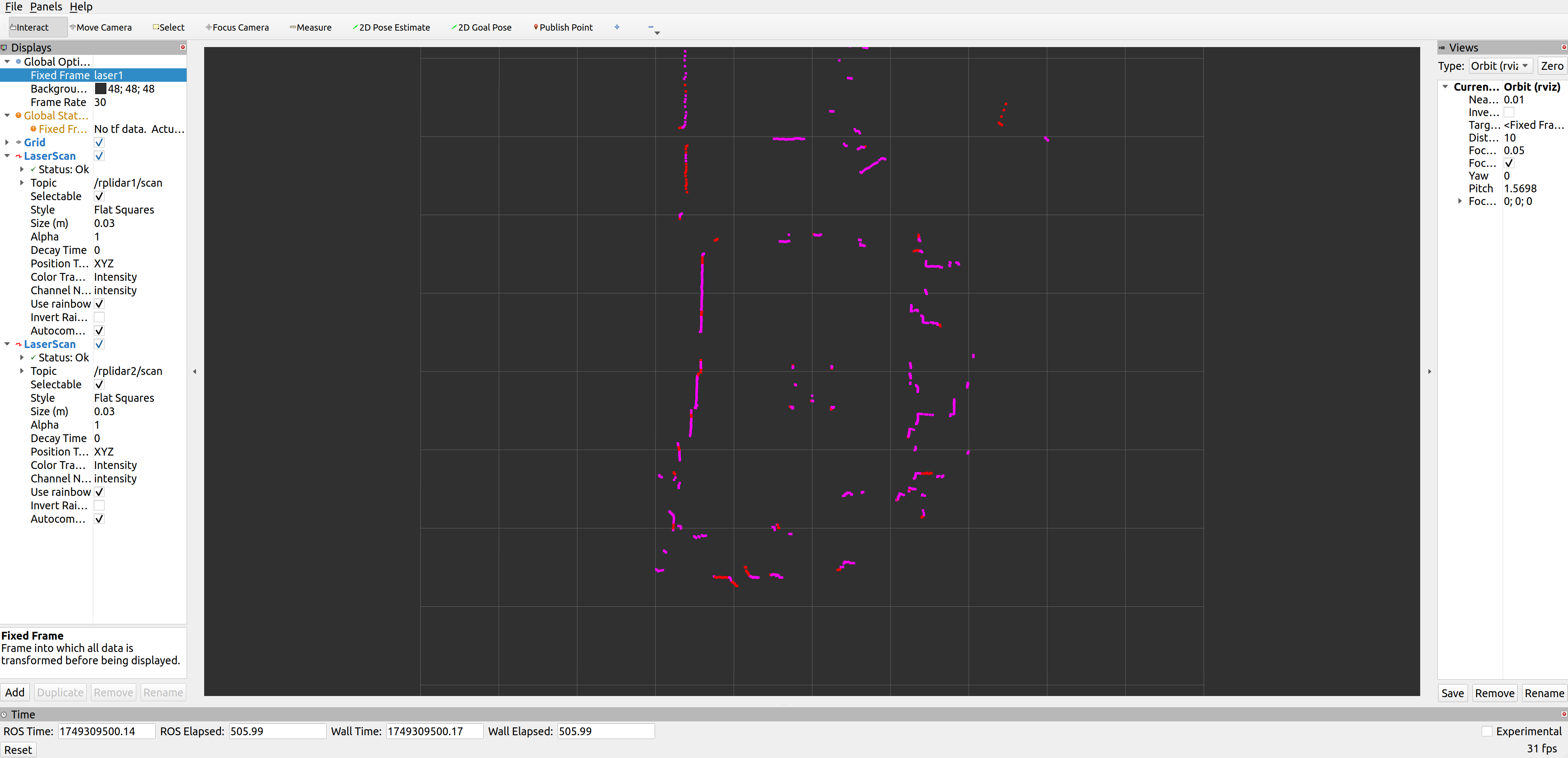
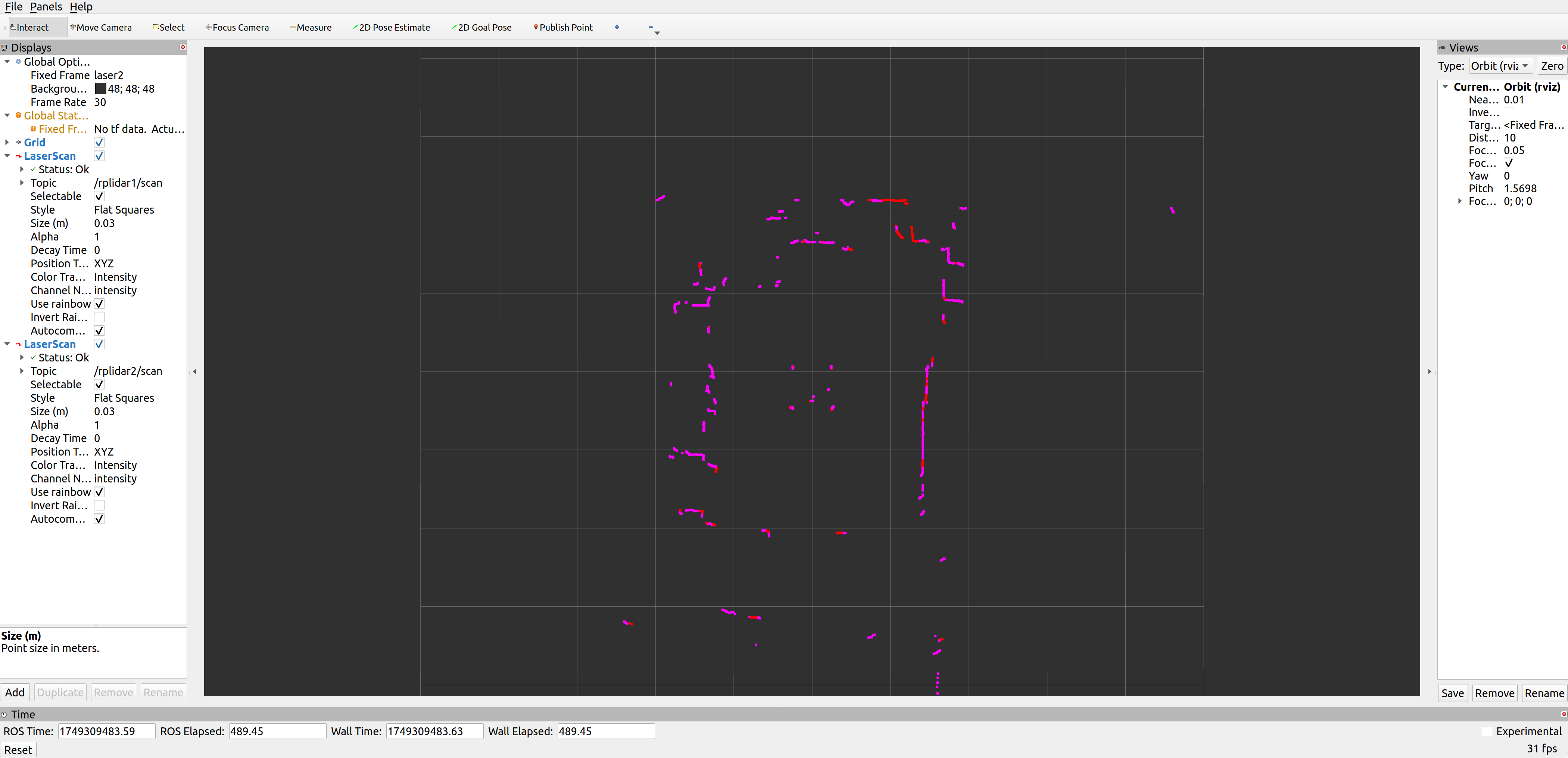
아직 물리적인 라이다의 위치 차이를 감안하지 못해서 중간의 레이저가 겹치는 이슈가 있음.